Introduction
Robotics has been evolving since the onset of industrialization, and is only further fueled by recent advances in all aspects of machine design and intelligence. With an impact on a variety of industries from food and manufacturing, health and rehabilitation, industry automation, self-driving, space exploration, etc., the field is growing its scope towards intelligence, collaboration and digital twins.
The market for robotic manipulators, and increasingly, mobile manipulators is experiencing significant growth, driven by increasing automation and need for flexible and versatile solutions. The market size for robotic manipulators was estimated at 15 billion in 2025, with a 12% annual growth rate. Autonomous Mobile Manipulation Robots (AMMRs) were estimated at a 3 billion market size with a 23% annual growth rate.
A quick google search will yield thousands of tailored solutions for industrial use. Within the scope of an academic level of engagement for research and education, the options are still in the hundreds. However, current industrial solutions often have little overlap with associated academic interests. This often results in a solution without the open architecture and access to all levels of the device, or an ability to integrate with your own research goals and learning outcomes.
Quanser Manipulators: QArm and QArm Mini
Quanser’s manipulators are designed from the ground up, to meet your research and education needs where they are at. Our two manipulators, the QArm, and QArm Mini, cover a variety of academic use cases, giving you a cohesive lab experience.
The QArm manipulator packs a punch with it’s larger form factor, medium payload capacity, sub-millimeter repeatability and accuracy, and carefully selected actuators to meet the power, safety and reliability requirements for versatile research tasks. The end-effector is further equipped with stereoscopic 3D camera as well as a breakout utility board to further extend it’s capabilities.
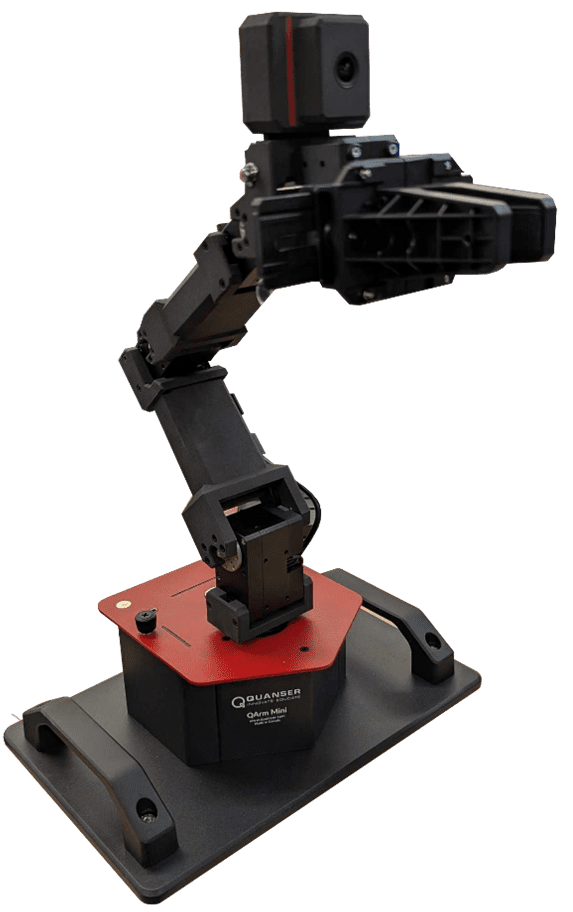
The QArm Mini manipulator on the other hand, was designed specifically with two intentions. Primarily, it gives your students a smaller form factor and approachable device for hands-on interaction via language agnostic education content. Secondly, it seamlessly integrates within the QBot Platform mobile robot, allowing you to easily scale and bridge manipulator robotics concepts to mobile robotics.
In the table below, I’ve summarized a few differences between the two platforms and how to choose between QArm and QArm Mini.
|
|
 |
||
| What do you need? | Considerations | QArm | QArm Mini |
| Compact workspace? | #space-constraints | ♠ | |
| Need depth sensing? | #research #cobotics | ♠ | |
| Need end-effector breakout? | #projects #customization | ♠ | |
| Need faster application control rates? | #research | ♠ | |
| Need current/torque control or limp modes? | #research | ♠ | |
| Need more units in a lab? | #budget #number-of-students | ♠ | |
| Bring your own gripper? | #research #customization | ♠ | |
| Require mobile robot integration? | #research #education | ♠ | |
| Need Python-based teaching content? | #education | ♠ | |
| Need a 1-to-1 digital twin? | #research #AI-ML | ♠ |

Quanser’s approach to Robotics
On the education front, we have designed comprehensive, application-centric curriculum that spans both manipulator and mobile platforms. Built on an open-architecture foundation and designed to be language agnostic, this unified ecosystem provides hands-on experience with industry-standard tools across multiple departments and educational levels. By integrating physical hardware with high-fidelity digital twins and supplying structured curriculum for each environment, Quanser ensures accessible, flexible instruction for both in-person and remote learners.
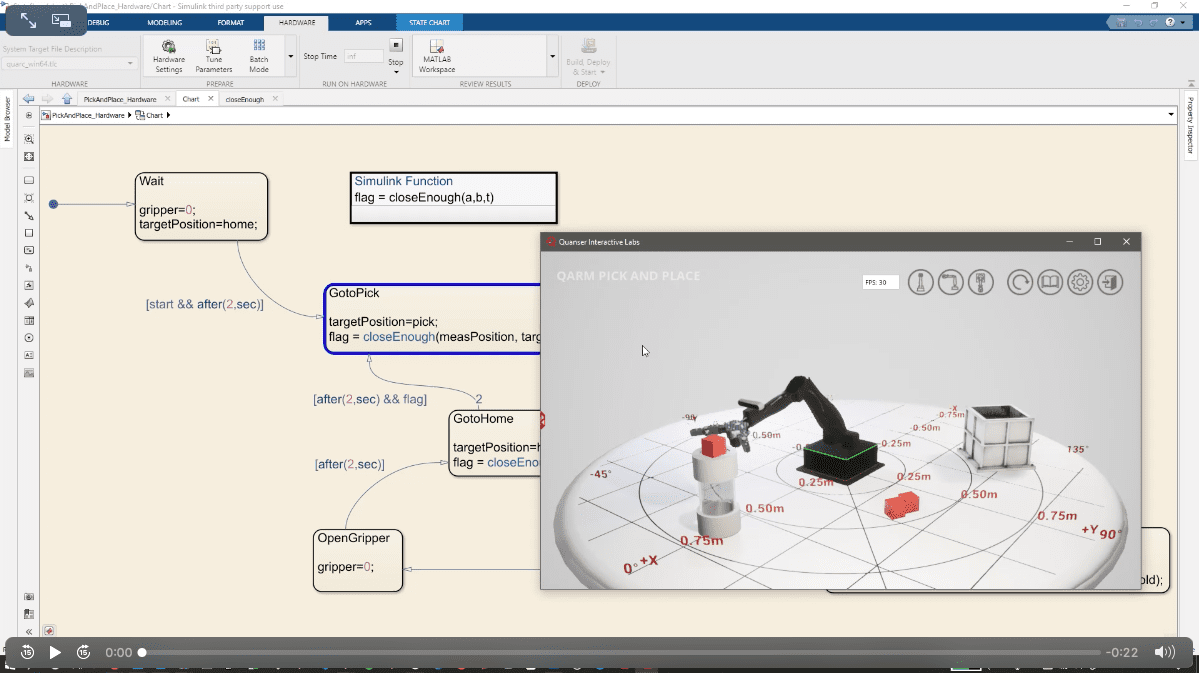
Mixed-reality pick and place with QArm and it's digital twin in Quanser Interactive Labs
The curriculum uses a goal-directed skills progressions and scaffolded labs, exploring fundamental mathematical concepts on kinematics, statics and dynamics hand-in-hand with industrial applications such as workspace identification, lead through, teach pendant, object tracking, self-localization, line-following, etc. By combining solid theoretical foundations with industry/research relevant application, Quanser’s curriculum prepares students for both academic research and real-world challenges—from manipulator robotics to mobile robotics, and beyond.
High accuracy pick and place with the QArm and a modified end-effector & gripper
On the research front, we’ve provided completed analytical formulations for kinematics, differential kinematics and dynamics for both platforms, and access to a variety of joint control modes including position mode, PWM mode and current mode. Whether your focus is on digital twins and Cobotics, haptic-feedback driven tasks, intelligent perception driven manipulation, or multiagent mobile automation with manipulation, the technology you need to get started is available through cost-effective solutions such as QArm and Quanser’s Intro to Robotics Lab.
Human-robot collaboration experiment - serving coffee
Concluding Remarks
Whether you are in the market for robotic manipulators for your course, or are looking for a open-architecture research platform, Quanser has you covered. We are constantly evolving our offering and expanding our application/courseware, and would love to hear from you. I hope this blog has helped you choose between QArm and QArm Mini. You can also check out the Intro to Robotics Teaching Labs, or contact us to get the conversation started.
Until next time, talk soon.
Murtaza