
You can find servomotors in many different systems. They are used in the joints of robot manipulator arms in car assembly plants, open valves in process plants, make electronic toys move, or are implemented in car power steering. They are also the most popular example in control system textbooks – and for a good reason. You can teach many topics of modeling and control systems with servomotors. The combination of representing real-world applications and being a great tool for teaching control systems theory makes servomotors a popular choice in university engineering labs.
Quanser offers two rotary servomotor systems for teaching and research applications: QUBE-Servo 2 and the SRV02 Rotary Servo. But how should you decide which one is the right system for your lab?
A Bit of Quanser Rotary Servo History First
The Rotary Servo SRV02 is one of the first Quanser solutions, going back 30 years. Dr. Jacob Apkarian, Quanser Founder, wanted his students to experience controls beyond equations on the blackboard and help them see how control design affects the real-life system. The SRV02 has stood the test of time. All these years later, with only a very few changes, the SRV02 is still one of the most popular Quanser systems and can be found in hundreds of control labs.
Taking advantage of new technology, Quanser engineers introduced a new rotary servo system in 2013 – the QUBE-Servo. It became popular very quickly, primarily in the undergraduate controls and mechatronics labs.
How Do SRV02 Rotary Servo and QUBE-Servo Compare?
Before you decide which of these two servomotor systems is right for your lab, you probably want to understand what the differences are.
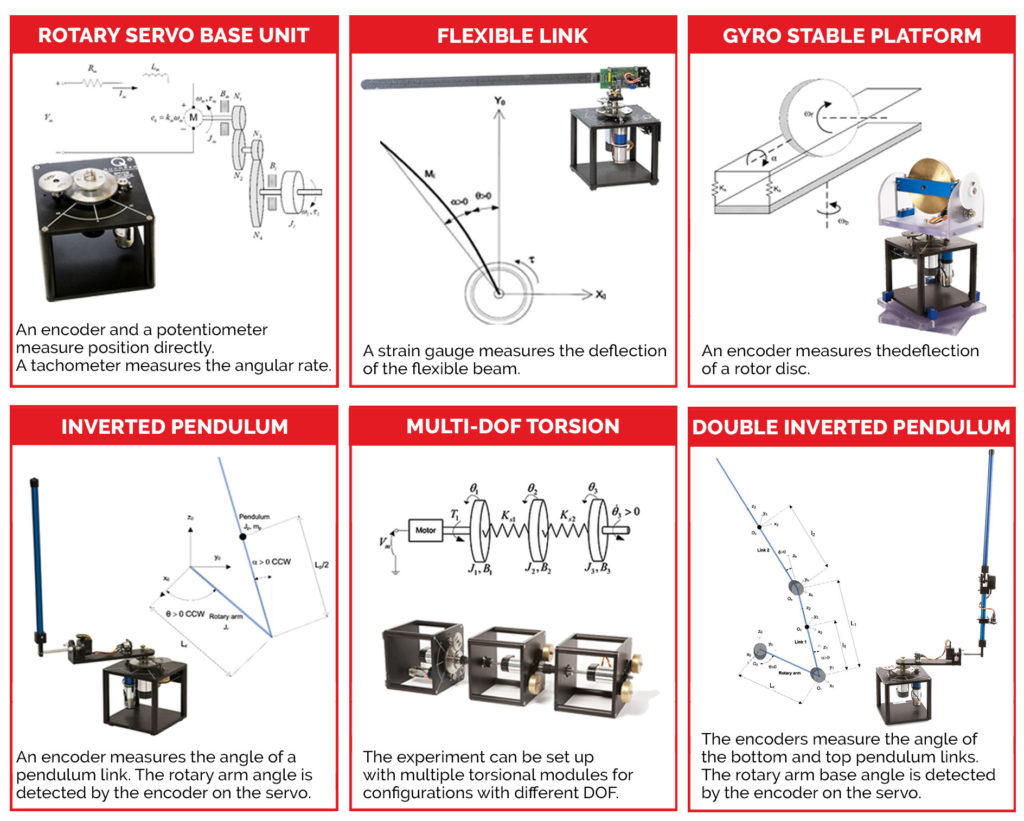
The unique feature of the SRV02 Rotary Servo is that it is expandable. You can choose from ten add-on modules that easily mount on the Rotary Servo base and allow you to study different control challenges. Or you can venture into different engineering application areas. The Rotary Flexible Link module, for instance, can emulate flexibilities found in lightweight robot manipulator links. The Rotary Inverted Pendulum allows you to teach “modern control” topics such as state-space, state-feedback, and nonlinear control.
Here are a few examples of the SRV02-based system with add-on modules and their corresponding free-body diagram to give you a better idea of the control/modeling challenge they address. (For the overview of all ten add-on modules, visit the product section of our website.)
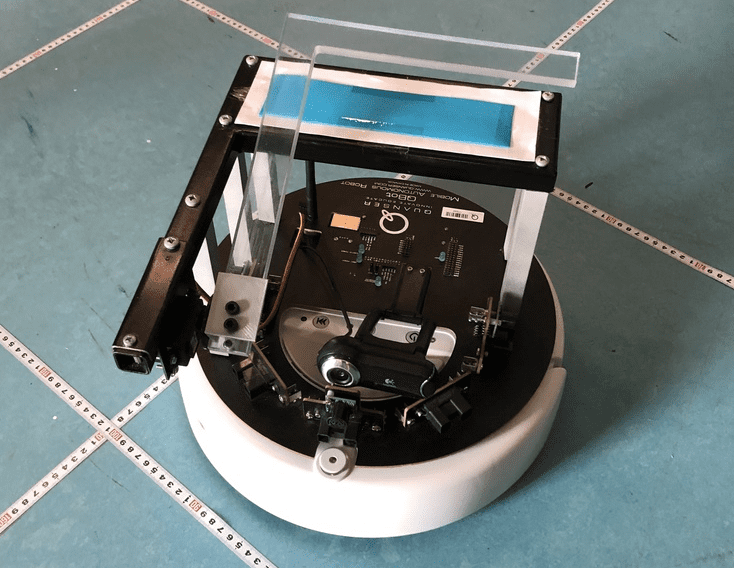
The main advantage of the QUBE-Servo 2 lays in the multiple interface options. Three different, easily interchangeable panels enable interfacing through DAQ-based USB, an embedded system such as Arduino or Raspberry Pi, or NI myRIO. Unlike the SRV02 Rotary Servo-based workstation that requires a separate power amplifier and data acquisition device to run the system, the QUBE-Servo 2 system has a fully integrated amplifier and DAQ. As a result, it requires much less lab space and is more portable than the SRV02 system. On the other hand, with QUBE-Servo 2, you do not have a variety of add-on modules for the future lab/topics expansion.

Choosing the Right Servomotor System
Back to the question of which servomotor is right for you: it really depends on your current and future needs. Are you planning on expanding your lab to incorporate different modeling and control challenges? Do you want to cover different application areas in the future? Or are you looking for an easy-to-use solution to get your undergraduate lab started?
For example, if you are new to Quanser and are looking for a few systems to start your undergraduate lab, the QUBE-Servo 2 may be the best solution. But if you are teaching more advanced controls topics in your lab, or studying certain advanced application areas, you may benefit from the SRV02 Rotary Servo. If the lab space is a concern, then you might choose the QUBE-Servo 2. If you want to explore more complex pendulum configurations (e.g., Double Inverted Pendulum), systems that exhibit flexibilities (e.g., Torsion), or robotic applications (e.g., 2 DOF Robot), then you can keep expanding your SRV02 Rotary Servo-based lab, one module at a time.
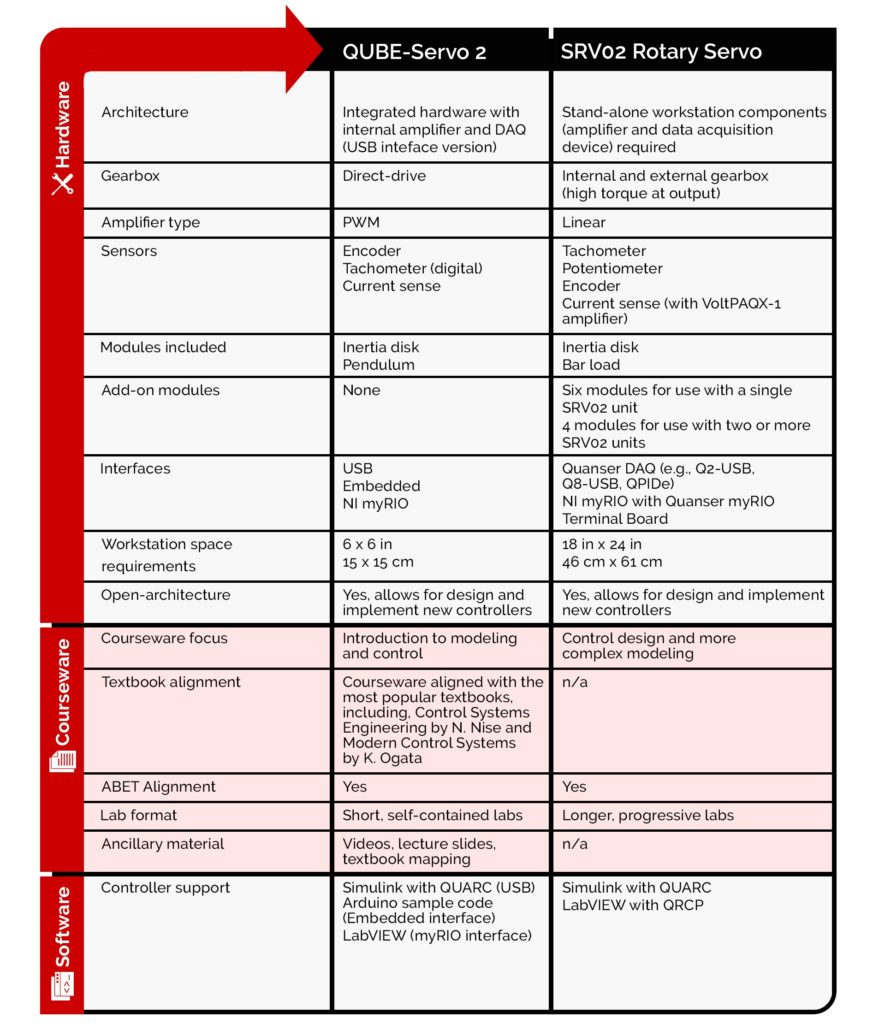
Still not sure? Here’s a quick summary of the main differences between the two systems:
Differences, but Many Similarities Too
Hopefully, this blog post helps you with the decision. In the end, you can’t go wrong either way. I focused mostly on the differences between the two servomotor systems, but it’s also important to point out that they have many similarities. Both systems
- use the Quanser software framework,
- have thorough courseware & documentation,
- are easy to set up and use,
- maintain the high-quality standards of Quanser, with repeatable results across units,
- are robust or “student-proof,”
- are open-architecture, i.e., allowing users to design their own controllers.
Therefore, in either case, you are adopting a solution that will save your lab both time and effort. Instructors can spend more time teaching and doing research and less solving lab hardware issues and developing course material. Students can benefit using high-quality systems, and actually, enjoy the labs and get a deeper understanding of the concepts that were taught in the lecture. Finally, researchers can use both these system as a validation platform to test their algorithms. Demonstrating the performance of controllers on actual hardware can increase the likelihood of your research paper to get published!