Lab Collection
Robotics & Mechatronics
As the potential applications for robotics and automation systems have grown over the last several decades, the need for multipurpose academic robotics and mechatronics labs that can be used to teach fundamental concepts and research potential applications has become irrefutable. The software and electromechanical flexibility of these platforms give unprecedented access to powerful and robust systems that can serve as a core element of a student's academic career, from introductory mechatronics, robotics, controls, and intelligent systems concepts to design projects, capstone, and graduate-level research.
Read More
Lab Collection
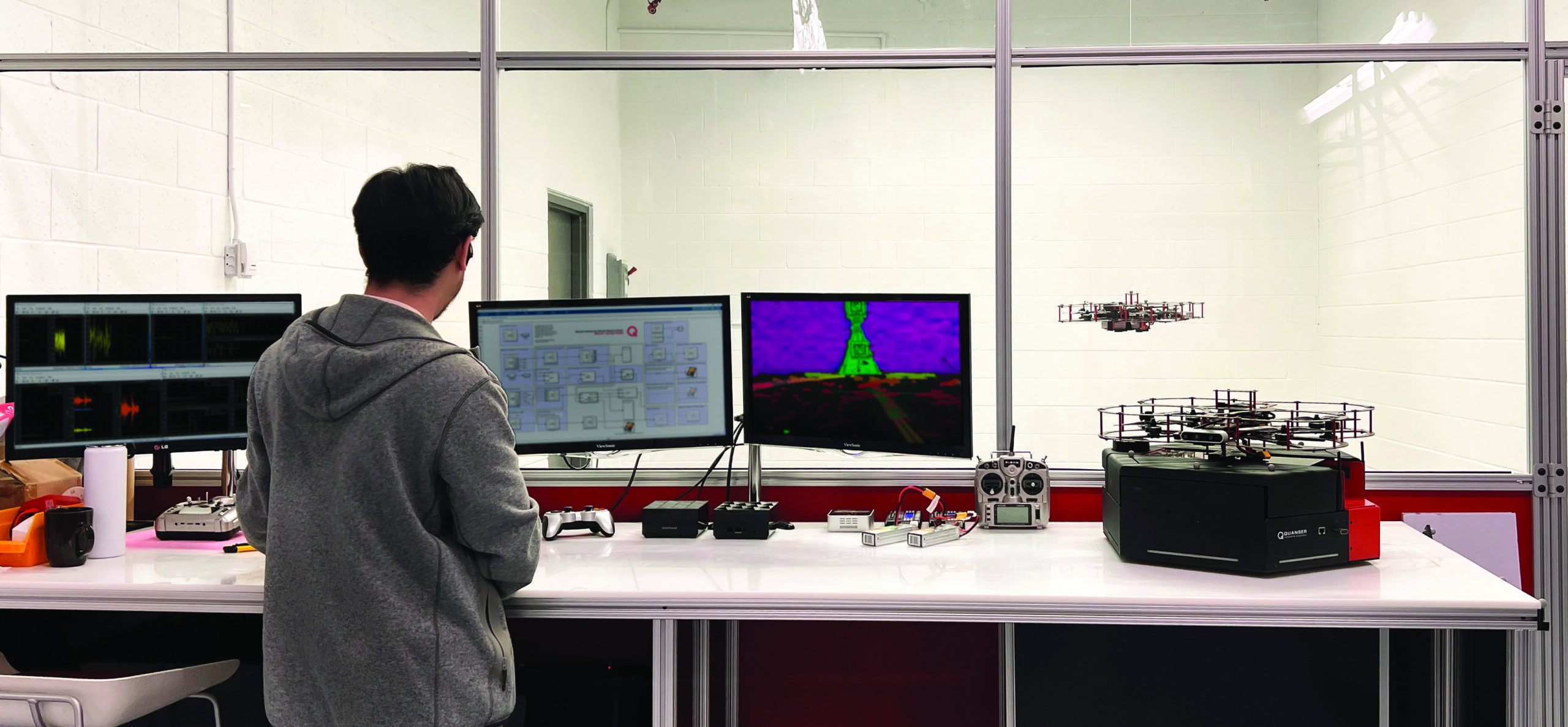
Autonomous Systems & Applied AI
To equip engineering graduates with the skills and expertise needed to tackle these challenges, the Quanser Autonomous Systems and AI Lab Collection is a turnkey collection of platforms, libraries, course resources, and laboratory infrastructure that brings complex theories to life. To catalyze innovative research, the lab offers powerful open-architecture platforms and digital twins that accelerate development and offer a reliable and flexible design and development backbone to generations of researchers.
Read More
Lab Collection
Control Systems & Dynamics
The Quanser Controls and Dynamics Lab Collection is the culmination of our decades of experience working with academic programs worldwide to develop exciting learning experiences and cutting-edge research. The lab is a complete collection of teaching and research platforms, software, resources, and digital twins that can take a controls lab from an empty room to a fully commissioned lab in hours instead of weeks or months.
Read More