
Robotics & Mechatronics
About This Lab
Robotics
Robotics has been evolving since the onset of industrialization and is only further fueled by recent advances in all aspects of machine design and intelligence. With an impact on a variety of industries from food and manufacturing, health and rehabilitation, industry automation, self-driving, space exploration, etc., the field is growing its scope towards intelligence, collaboration and digital twins.
Quanser’s robotics curriculum offers comprehensive, application-centric learning solutions that span both manipulator and mobile platforms. Built on an open-architecture foundation and designed to be language agnostic, this unified ecosystem provides hands-on experience with industry-standard tools across multiple departments and educational levels. By integrating physical hardware with high-fidelity digital twins—and supplying structured curriculum for each environment—Quanser ensures accessible, flexible instruction for both in-person and remote learners.
The curriculum uses a goal-directed skills progressions and scaffolded labs, exploring fundamental mathematical concepts on kinematics, statics and dynamics hand-in-hand with industrial applications such as workspace identification, lead through, teach pendant, object tracking, self-localization, line-following, etc. By combining solid theoretical foundations with industry/research relevant application, Quanser’s curriculum prepares students for both academic research and real-world challenges—from manipulator robotics to mobile robotics, and beyond.
• Explore foundational robotic mathematics – position/differential kinematics, statics & dynamics
• Gain operational skills in the practical software implementation of kinematic and dynamic formulations
• Explore essential robotic algorithms related to self-localization, object tracking, path planning & navigation
• Explore industrial applications such as workspace identification, lead through, teach pendant, & task automation
• Critically analyze robot configuration, design and cascade control while developing broad engineering literacy
• Robot Modeling and Control by M. W. Spong, S. Hutchinson and M. Vidyasagar
• Introduction to Robotics: Mechanics and Control by J. Craig
• Introduction to Autonomous Mobile Robots by R. Siegwart, I. R. Nourbakhsh and D. Scaramuzza
| Manipulator Robotics | Mobile Robotics |
Workspace identification Lead through |
Wheel speed motor control Body speed estimation |
Teach pendant Trajectory generation |
Body speed actuation Task space speed control |
Singularity identification Singularity avoidance Numerical inverse kinematics Statics & payload sensing |
Blob detection Line following Obstacle detection |
Dynamic modeling and digital twins Current-based torque sensing |
Lidar scan matching Sensor fusion |
Morphological object detection Intelligent object detection |
Position control Robot navigation Simultaneous mapping & localization |
Joint space visual servoing Task space visual servoing Cobotics |
Task queue execution Task queue generation Multirobot collaboration |
Mechatronics
- Modern Mechtronics
- Learning Objectives
- Textbook Mapping & Reference Material
- Relevant Mechatronics Programs
In today’s manufacturing industry, mechatronics plays a crucial role in driving automation and efficiency across various sectors and the integration of mechanical, electrical and computer systems. Active academic research in Mechatronics is also exploring the development of intelligent machines optimizing production lines and product quality, streamlining processes using robotics, advanced sensors, and real-time control systems. This sector impacts prominent complex systems ranging from manufacturing robots, precision surgical instruments, smart consumer electronics, all the way to advanced self-driving technology.
Our approach to mechatronics education focuses on the development of design instincts over design experience, and a broad engineering literacy rather than specialization. The multilayered curriculum combines system wide component exploration and creative problem solving.
The Mechatronics Design Lab provides a balanced design experience for your undergraduate mechatronics program with intuitive curriculum built upon Quanser’s Mechatronic Sensors Trainer and Mechatronic Actuators Trainer. The curriculum organizes learning objectives and lab content in the form of layered fundamental labs, guided challenges and projects with each layer bringing students closer to application contexts.
• Understanding of distance, motion, environmental, light, force and touch sensors
• Develop skills in making context-dependent design decisions for multi-sensor perception systems
• Apply relevant techniques for sensor data acquisition, processing and sensor-fusion
• Explore the working principles of brushed/brushless DC motors, stepper motors & servos in action
• Develop skills in functionality and performance based motor selection and datasheet analysis
• Develop knowledge of relevant techniques in control systems and transmission mechanisms
• Handbook of modern sensors: Physics, Designs, and Applications by J. Fraden
• Mechatronics: Electronic Control Systems in Mechanical and Electrical Engineering by W. Bolton
• The Mechatronics Handbook, second Edition – 2 volume set. by R. H. Bishop
• Sensors for mobile robots by H. Everett
Quanser’s Mechatronics Design Lab curriculum is inspired by the innovative programs and efforts of
these institutions.
- University of Waterloo, Canada
- Royal Melbourne Institute of Technology, Australia
- Purdue University, USA
- University of Manchester, England
Quanser has engaged with the following partners for key transformative experiences across their entire program.
- Ackland University of Technology, New Zealand
- Oklahoma State University, USA
- Norwegian University of Science and Technology, Norway
- Shenzhen Polytechnic College, China
Related Products
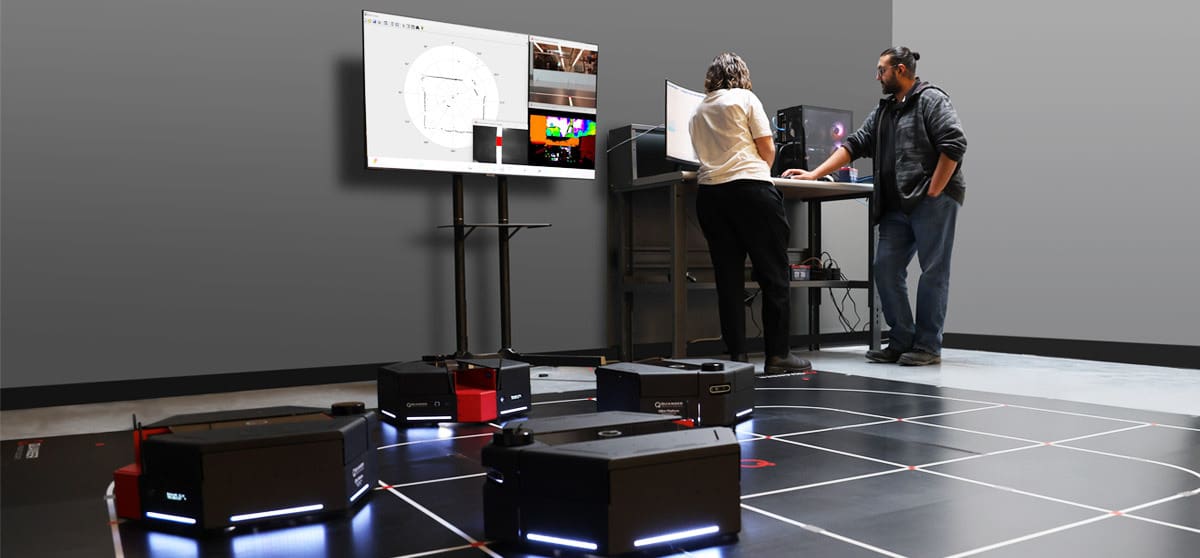
Mobile Robotics Lab
Turnkey Solution for Advancing Education, Research, and Project-based Learning in Mobile Robotics

Mechatronics Design Lab
Empower your students with industry-relevant mechatronic design skills and accelerate project based learning with Quanser's Mechatronic Trainers

Introduction to Robotics Teaching Lab
Flexible, Plug-and-Play Robotics Lab for Multidisciplinary Teaching

QBot Platform
High-performance Autonomous Ground Robot for Indoor Labs
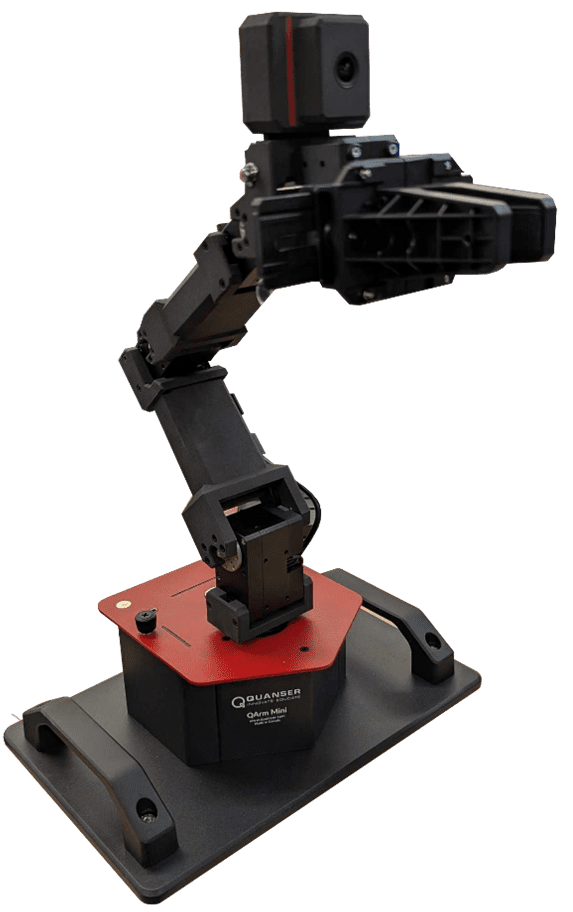
QArm Mini
Safe and academically focused robot designed to bring interactive hands-on learning to undergraduate manipulator courses

QLabs Virtual QBot Platform
Virtual platform for distance and blended undergraduate mobile robotics courses
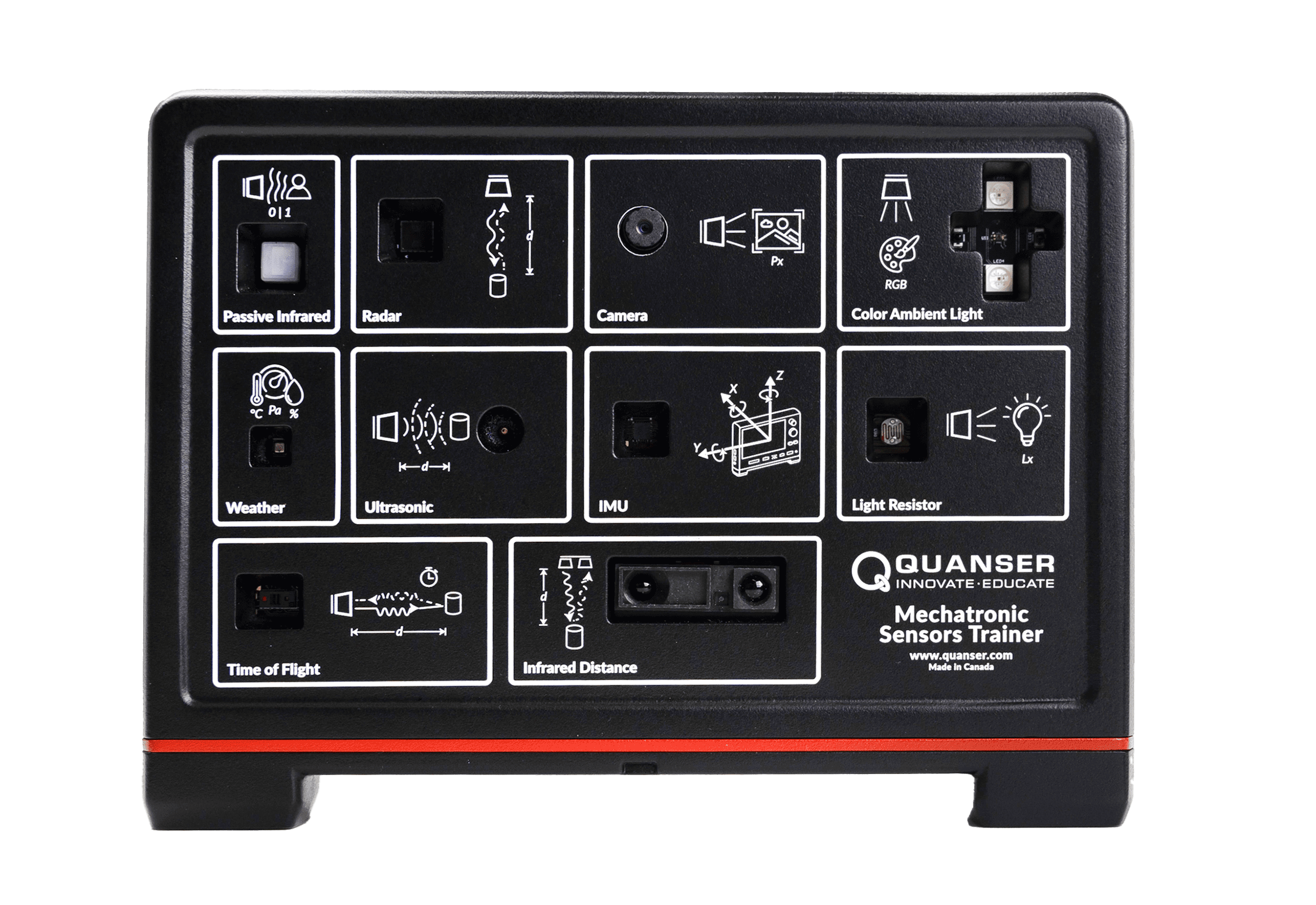
Mechatronic Sensors Trainer
Empower your students with industry-relevant mechatronics design skills, and accelerate project-based learning

Mechatronic Actuators Trainer
Empower your students with industry-relevant mechatronics design skills, and accelerate project-based learning

Qube-Servo 3
The quickest path to practical controls
Related Case Studies
LEVERAGING HYBRID LEARNING: To Deliver an Ambitious Control Systems Course

Unlocking Potential: Industry-Driven Curriculum at Cal Poly Pomona

